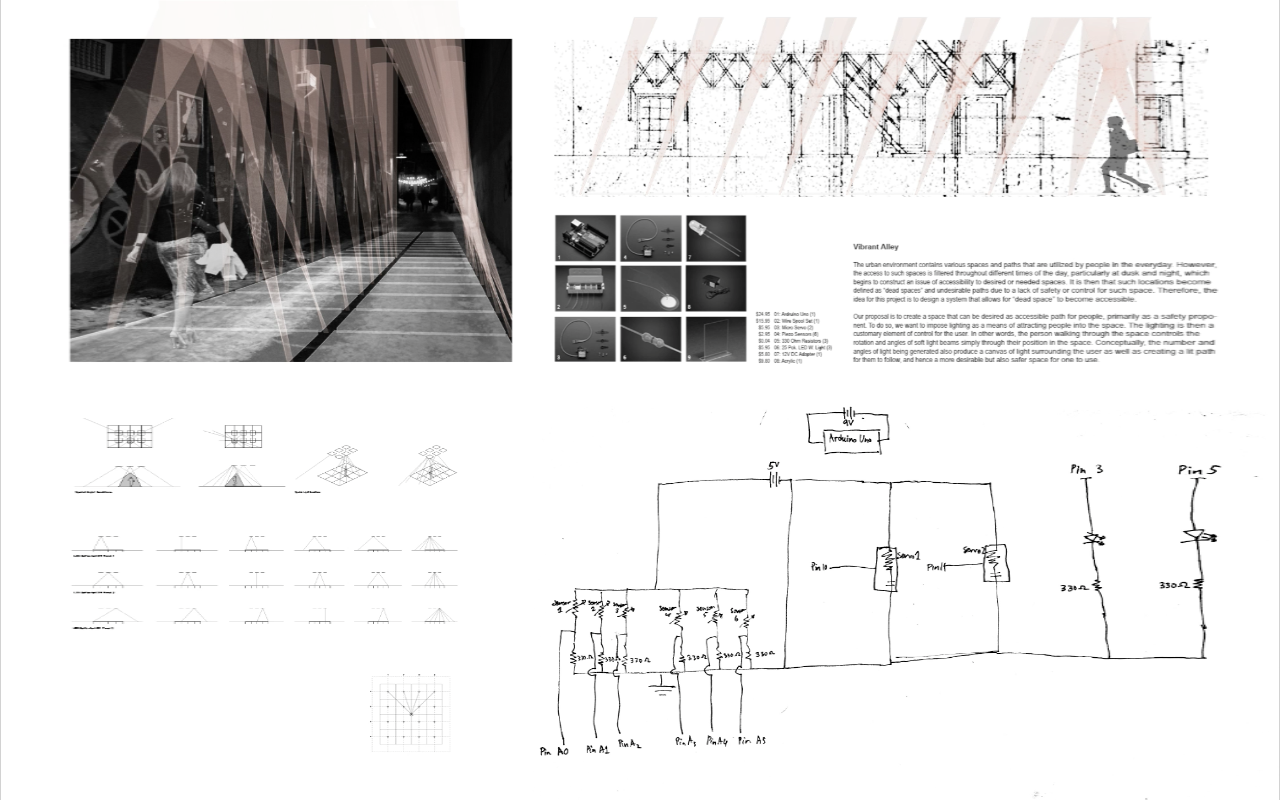
The urban environment combines various spaces and paths that are used by people everyday. However, the access to such spaces is filtered through different times of the day, particularly at dusk and night. These restrictions begin to construct an issue of accessibility to desired or needed spaces. Such locations can be defined as “dead spaces” or undesirable paths due to a lack of safety or control in the space. Therefore, the idea of this project is to design a system that allows for dead space to be accessible.
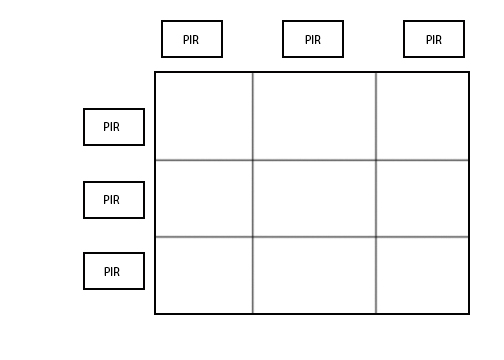
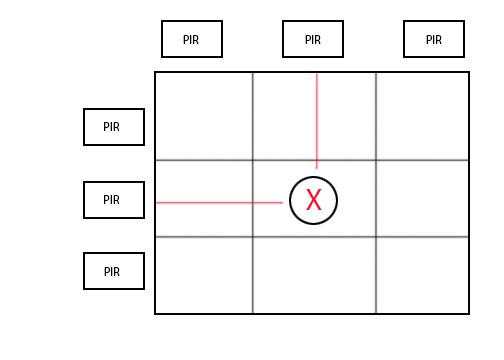
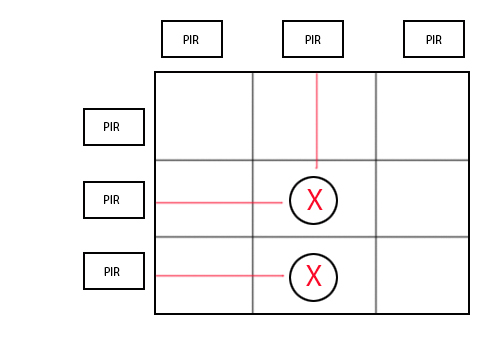
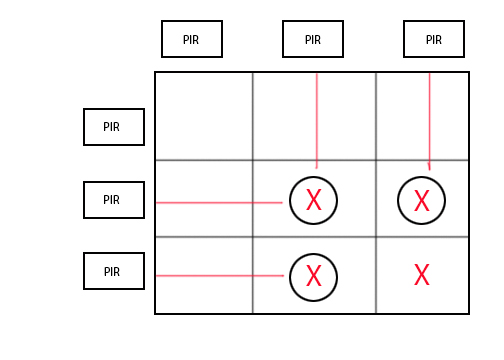
Our proposal is to create a space that can be desired as an accessible path for people, particularly in the interests of safety. To do so, we want to improve lighting as a means of attracting people into a space. The lighting is then a customary element of control for the user. In other words, the person walking through the space controls the motion and angles of soft light beams simply through their position in space. Conceptually, the number and angles of light being generated produce a canvas of light surrounding the user as well as creating a lit path for them to follow, and hence a desirable and safer space for one to use.
In our prototype, we purposes LEDs and servo motors to direct the lights based on an object’s position in the grid, but on a full scale model, a brighter beam would be necessary for the project.
In the first video, a close up of one servo can be seen–the motor’s movement redirects the light to each location.
In the second video, the motors can be seen sweeping from the left side to the right–they are alternately pointing to the leftmost pad, then the center, then the rightmost, with a short delay in between. Although we could not get the motion detection to work completely correctly, the motors do have the capacity to point to specific coordinates in a coordinated manner.
finalvid [Concept Video]
-Tessa Crawford, Angelo Razo, Mathew Hoffman, Tanay Nandgaonkar